As science is progressing rapidly day by day and providing easy and comfortable life to the people of the earth. In this article, we are discussing about a robotic art which is not only a robotic arm but also a step of science towards success because it’s going to available for the people in very low cost.
Main properties of the arm:
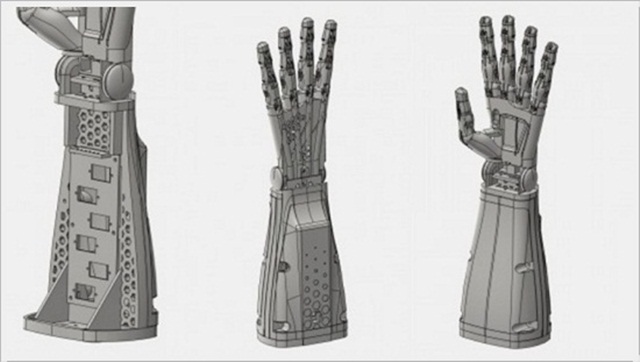
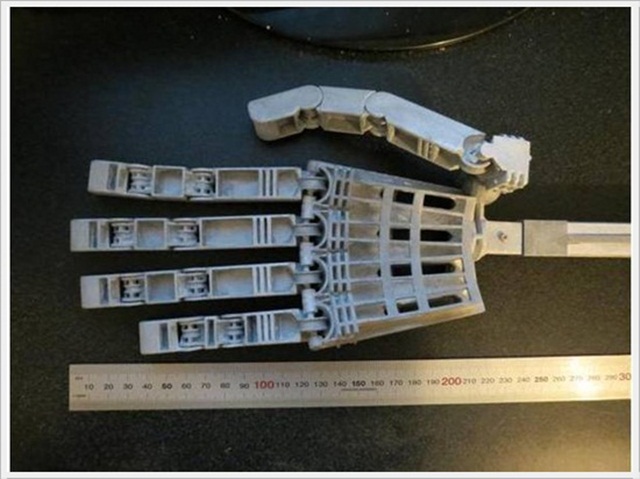
- There are 6 degrees of freedom provided to the arm for various parts of the arm such as one wrist, four fingers and a thumb.
- In order to provide the movement to the hand, there is a tendon system of 5 Hobby Servos.
- For easy and smooth opening and closing of the joints, there are small elastic bands.
- It’s very easy to assemble and remove all the parts which make it easy to repair while any problem occurs.
- In order to get the electronic energy, commercial servo and arduinos drivers are the main drivers used by this arm.
Users can easily download the software to control the movement of the arm from the website which allows the users to control the arm via Pc and some other devices such as EEG etc. With the help of source code of the software, you can make control system according to your need.
Various models of the fingers will be available on the website which allows the users to design their own and print them out and connect with the arm use. This system makes the arm more customizable and useful as well.
Upcoming Modifications in the Arm:

The team working on this impressive project has revealed about a plenty of modification of the arm which are yet to happen. The only requirement for those modifications is proper and complete funding for the project.
- As the hardware used in the project is more expensive than the circuit used. The main ask is to make the hardware of less cost with more efficiency.
- In order to know the appropriate position of the arm, Hall Effect sensors can be used.
- To provide the sense of touch to the arm, some sensors such as temperature and pressure sensors and microphone could be fitted.
- To provide the smoother and easy movement to hand according to the atmosphere, easily manageable elastic material in the tendon system could be fitted.
- In the current design of the arm ABS plastic is used as core material, but Nylon is better than that of ABS plastic because of its strength and weight. And hence, it could be a great idea to use Nylon as main material for Prosthesis.
- Small bearings could be use to provide good strength to the arm.
- Presently, the control gloves are very basic but future model of the control gloves will be more featured and having greater control over the arm. And in the future model, sensors can also be controlled with gloves.
It’s not a product of any company, it’s just a prototype created by intelligent and creative mind (Easton and Chris). If you want that such kind of product should be available in market for the convenience of people then you should try to help in the requirement to complete the project.
Just click the link mentioned below and donate as much as you want. But remember, it’s not a donation for a project but it’s a donation for a new step of science.



